
Kilo DM Controller development
Eduardo Bendek and Pedro Godoy
Contact: eduardobendek at gmail. com
V2.0 April 1st, 2015
Goal
Develop a compact DM controller for the Kilo DM that can:
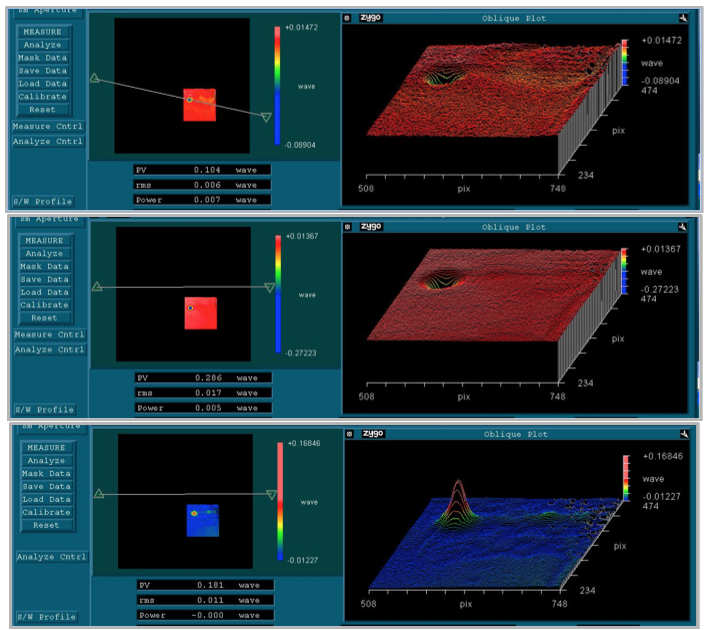
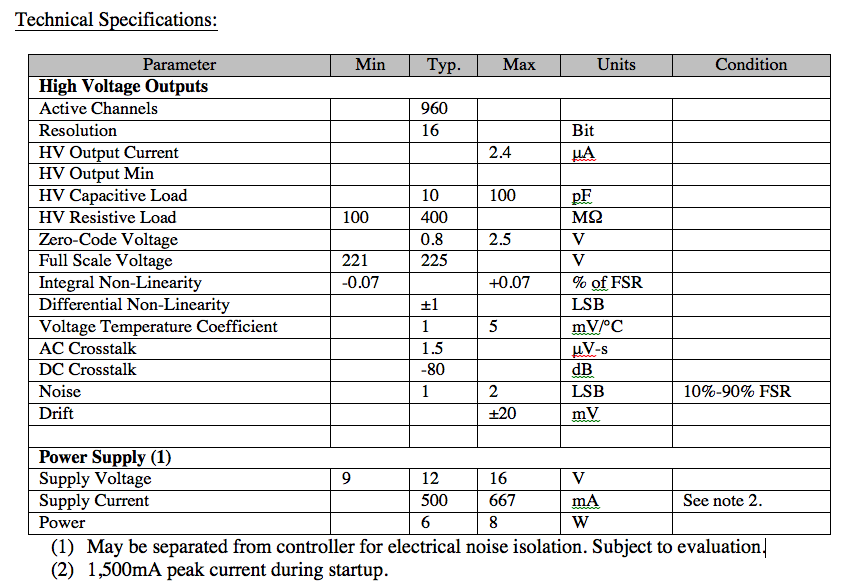
- deliver at least 14bit resolution over a 200V dynamic range at frequency faster than 1kHz.
- The controller will be directly integrated with the Zif Socket eliminating the need for cables and providing a direct mechanical connection from the bench mount to the DM. The controller
- The controller will have a volume of 4”x2”x1” and only uses less than 6W and weight less than 0.5kg.
- It has a simple 12V power supply and a USB 3 interface for the data.
- DM remapping is built in.
- Is design to be space qualified.
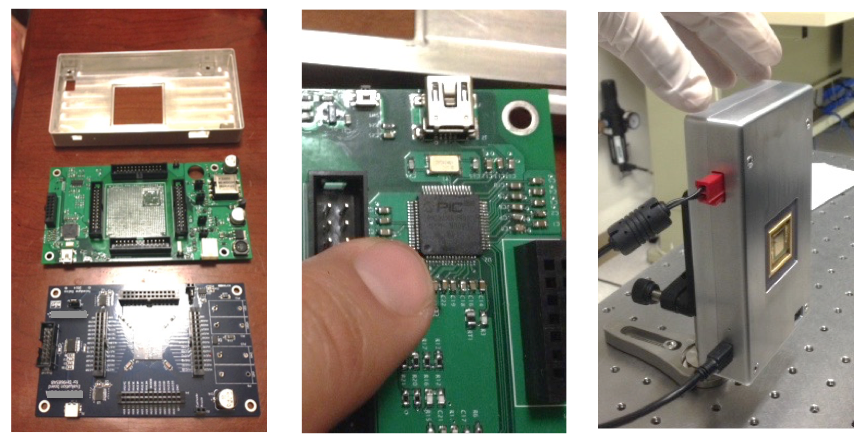
Current demonstration of Kilo DM Demo controller 96 actuators:
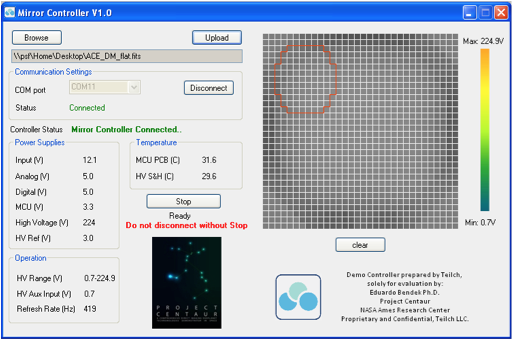
The Kilo DM Controller Demo is a fully integrated and fully operational system, but with only 94 active channels. The software accepts standard 32-bit FITS files. The hardware only requires a 12V power supply and a USB connection with the host computer. Only 96 channels were enabled to minimize cots and demonstrate functionality of the technology. The controller is only 4”x2”x1” and only uses 4.5W and weight less than 0.5kg.
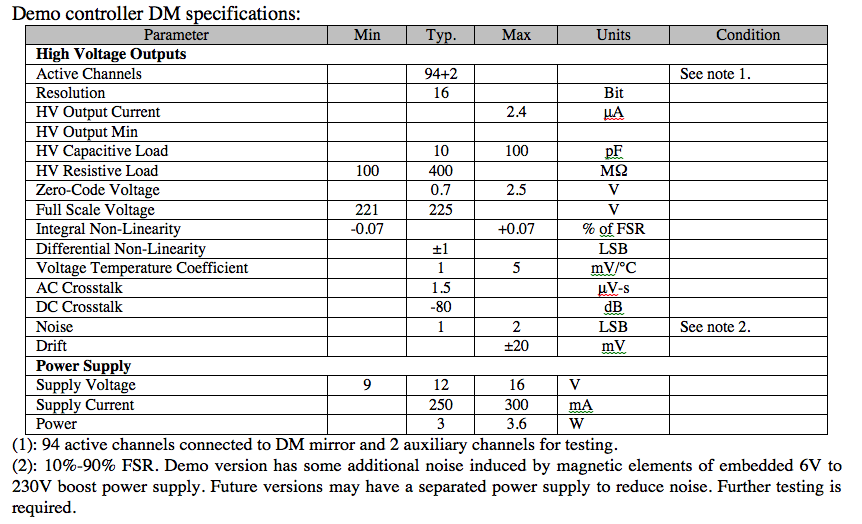
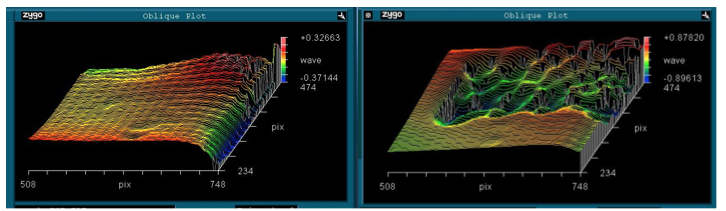
Kilo DM Demo controller testing: The controller was able shape the surface of the mirror. Lack of information about actuator remapping prevented us from achieving smooth surfaces, however the technical functionality has been successfully demonstrated as shown in Fig. 2 and 3.
For this project we have developed Windows software to control the DM from any laptop. The software was successfully tested in the lab computer and it can operate with standard FITS files that LabView generates so it can replace the current controller without any software changes.
DM Demo Controller Conclusion:
The development of a compact DM controller for a BMC Kilo-DM mirror has been successfully demonstrated. Our next step is to build a controller with same specification can be built to control 1032 actuators and still fit in the same compact enclosure.
Kilo DM full size Controller proposal
The Kilo DM Controller is a fully integrated and fully operational system with 960 channels. The software accepts standard 32-bit FITS files. The hardware only requires a 12V power supply and a USB connection with the host computer.
Preliminary footprint:
The design considers a 12-Layer Flex-Rigid PCB with soldered Zif socket. Final footprint is subject to further evaluation, but should be close to images below.
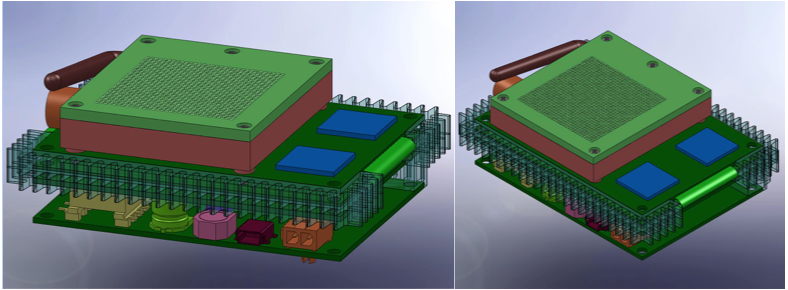
There are two alternatives of compact and highly integrated ICs that may be utilized. However, stock availability is limited and must be secured after the acceptance of this proposal. Final footprint is conditioned to ICs availability.
